Architecture des ordinateurs
Mémoires, périphériques et interruptions
2026-07-09
Les mémoires vives
Registres

Capacité : \(\approx\) 32-64 bits
Temps d’accès : \(\approx\) 1 ps (\(10^{-12}s\))
Volatile
Les mémoires vives
Static Random Access Memory (SRAM)
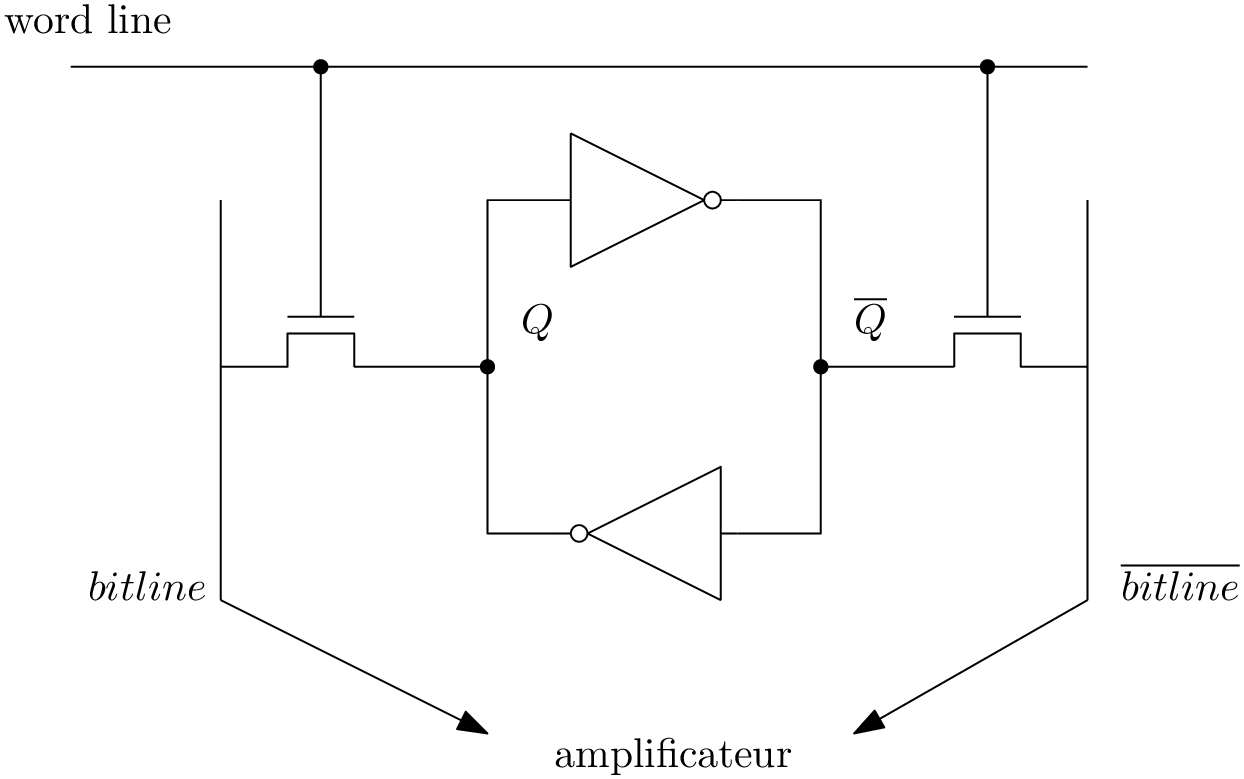
Capacité : 10 Ko - 10 Mo
Temps d’accès : \(\approx\) 1ns
Volatile
Les mémoires vives
Dynamic random access memory (DRAM)
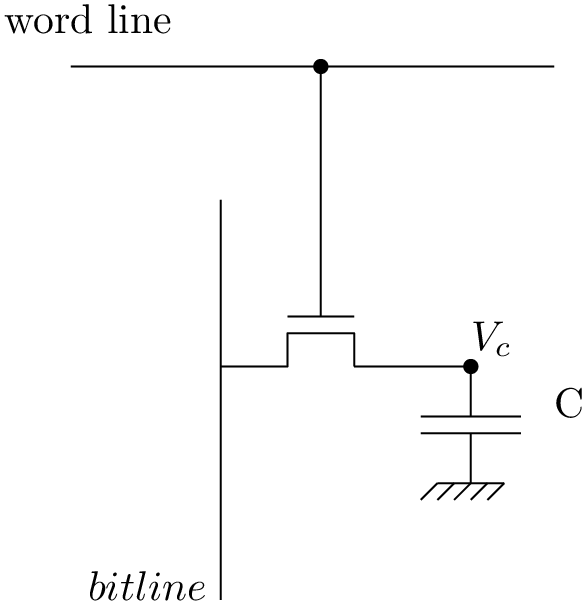
Capacité : 10 Go
Temps d’accès : 80 ns (réécriture toutes les ms)
Volatile
Les mémoires de masse
Disque dur magnétique
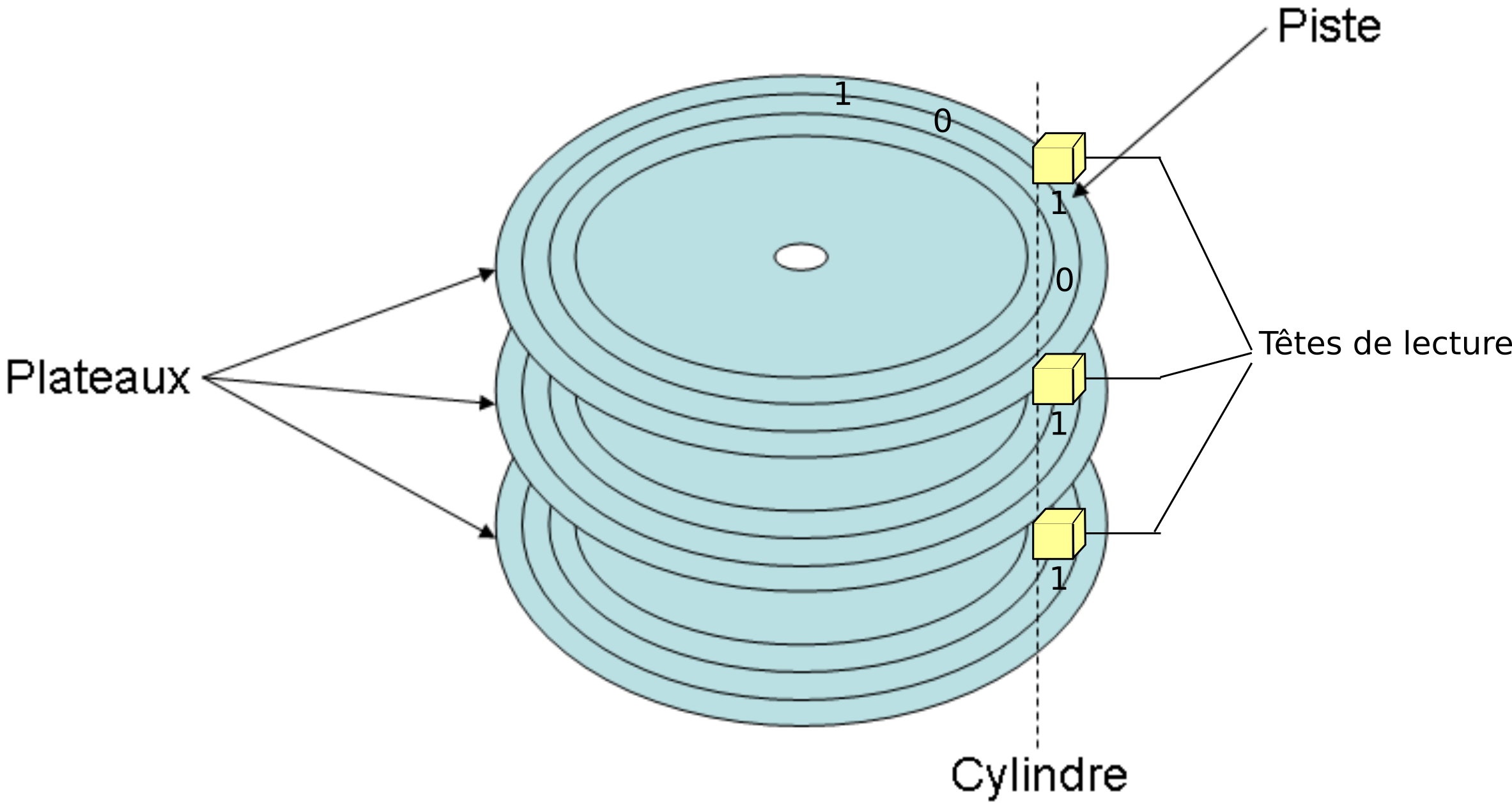
Capacité : 1 To
Temps d’accès : 10 ms
Non volatile
La clé : le principe de localité
Les principes de localité
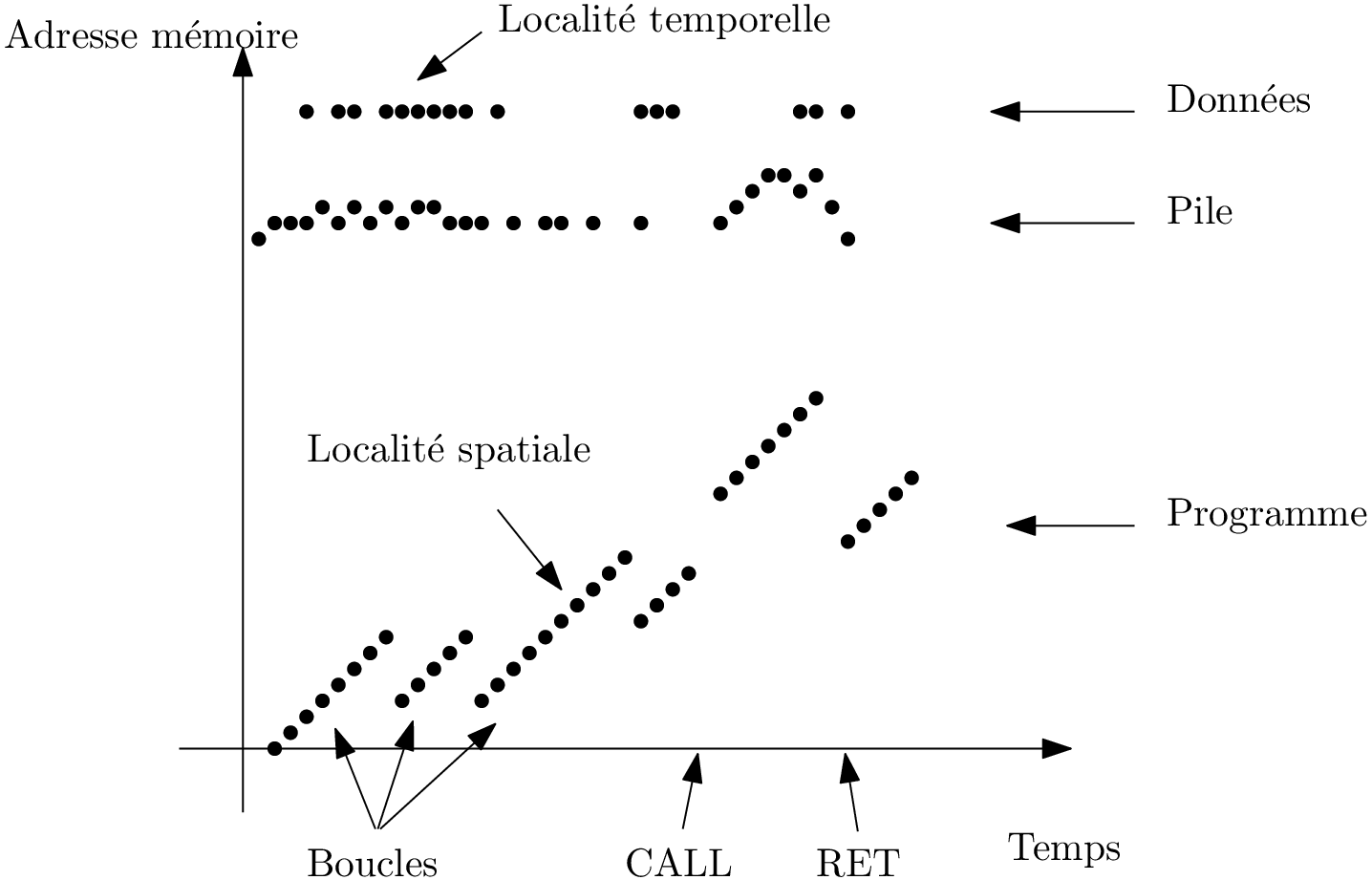
- localité spatiale : les accès futures en RAM se feront à des addresses proches des accès courants
- localité temporelle : une donnée accédée récemment sera certainement réutilisée prochainement
Idée: combiner une petite mémoire rapide avec une grosse mémoire lente
- Localité temporelle : on charge en mémoire rapide une donnée à laquelle on accède
- Localité spatiale : on charge aussi les voisines
Problème de doublons ? Politique de remplacement ? Dépends de la réalisation…
Réalisations matérielles d’un cache
Cache à correspondance directe
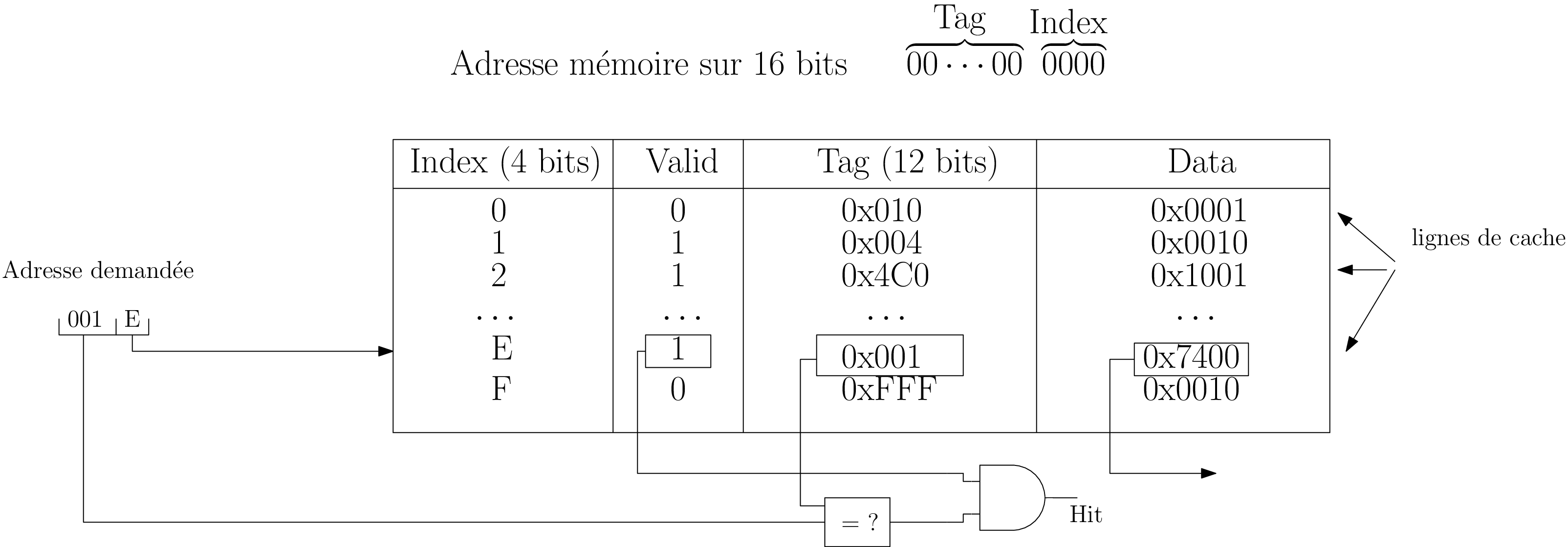
RAM[Adr] → Cache[Adr₃Adr₂Adr₁Adr₀]
pourquoi les bits de poids faibles comme index ?
Réalisations matérielles d’un cache
Cache à correspondance directe par bloc
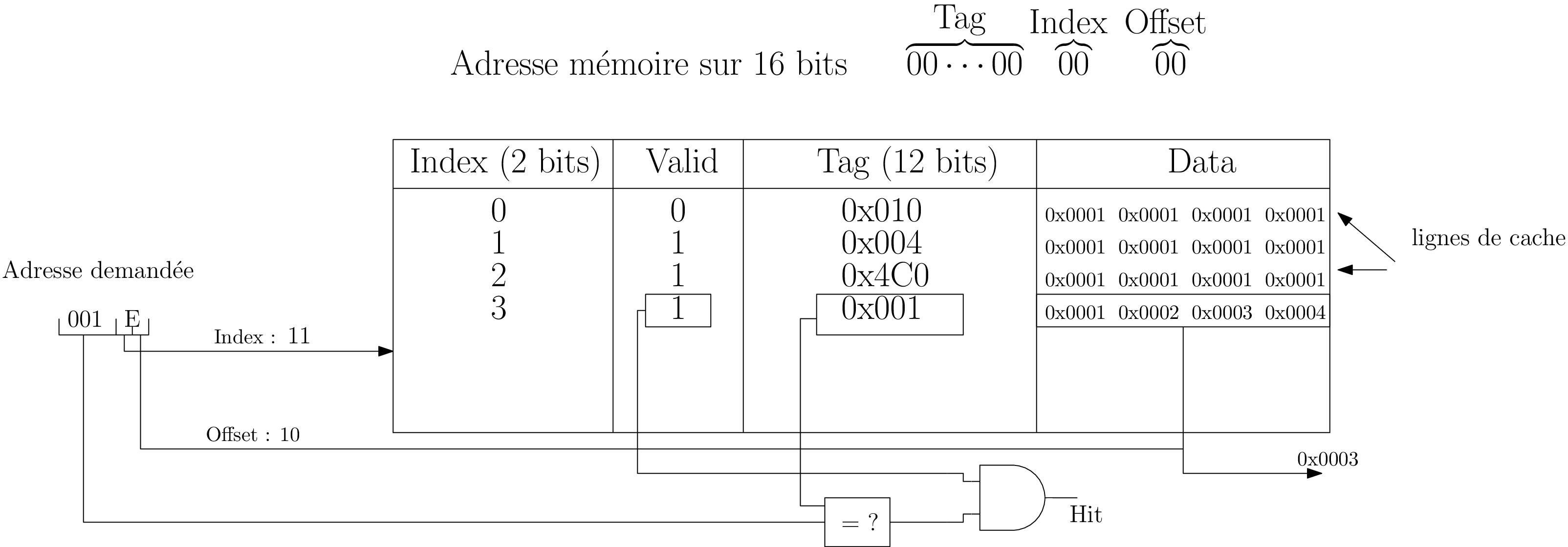
Un bloc : \(2^{|offset|}\) mots;
Toutes les adresses de même “Index” ciblent la même ligne.
Réalisations matérielles d’un cache
Cache associatif
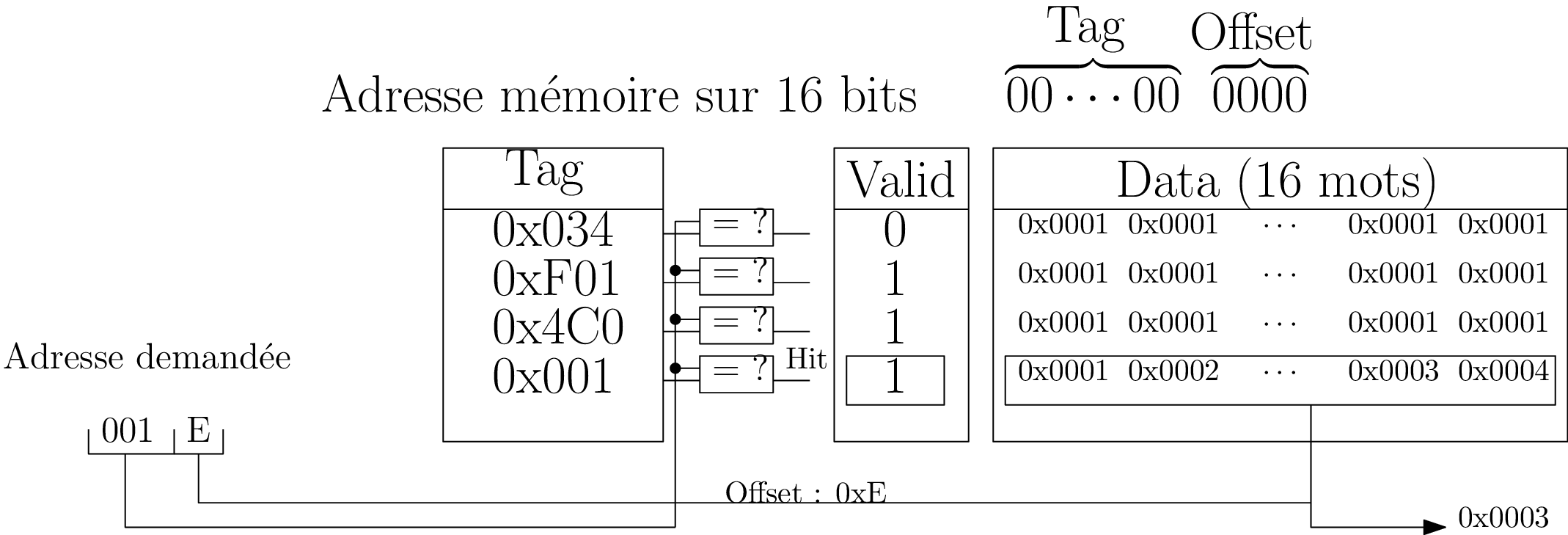
Une donnée peut occuper n’importe quelle ligne de cache. Lourd matériellement.
Réalisations matérielles d’un cache
Cache associatif à n entrées
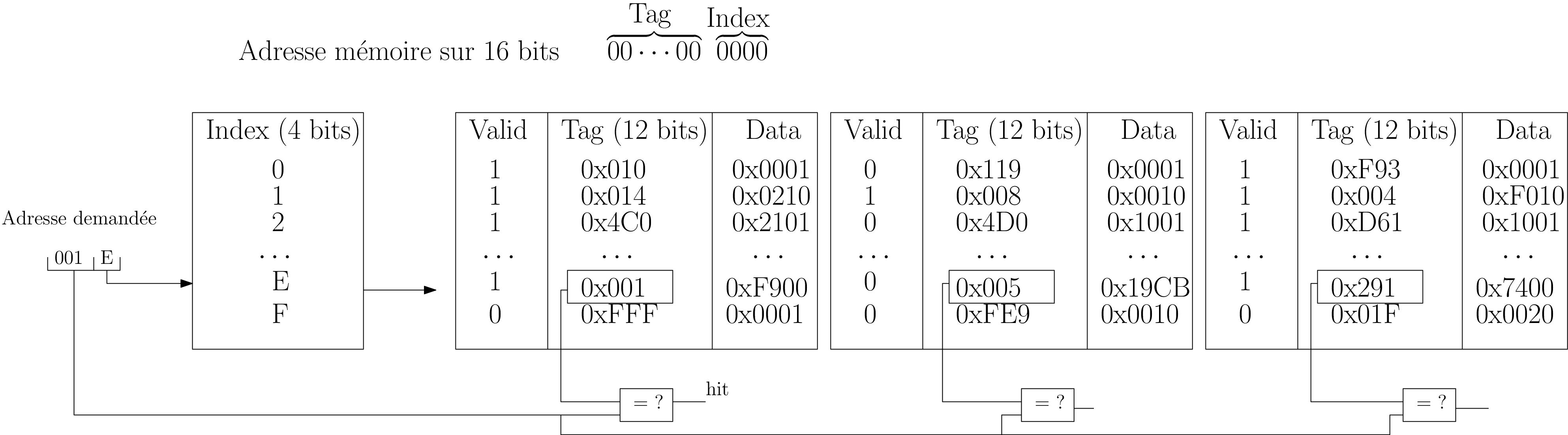
Indexable comme les caches directs, cache[index] étant associatif
Cohérence cache/mémoire centrale

Problème
Une donnée d’une même adresse peut être à la fois en cache, mémoire centrale, voir même sur le disque (e.g. swap)
Politiques d’écriture
- Write through : propagation immédiate d’une modification vers la mémoire principale
- Write back : écriture différée; écriture au remplacement (dirty bit)
Les périphériques d’entrée/sortie
Les périphériques d’entrée/sortie
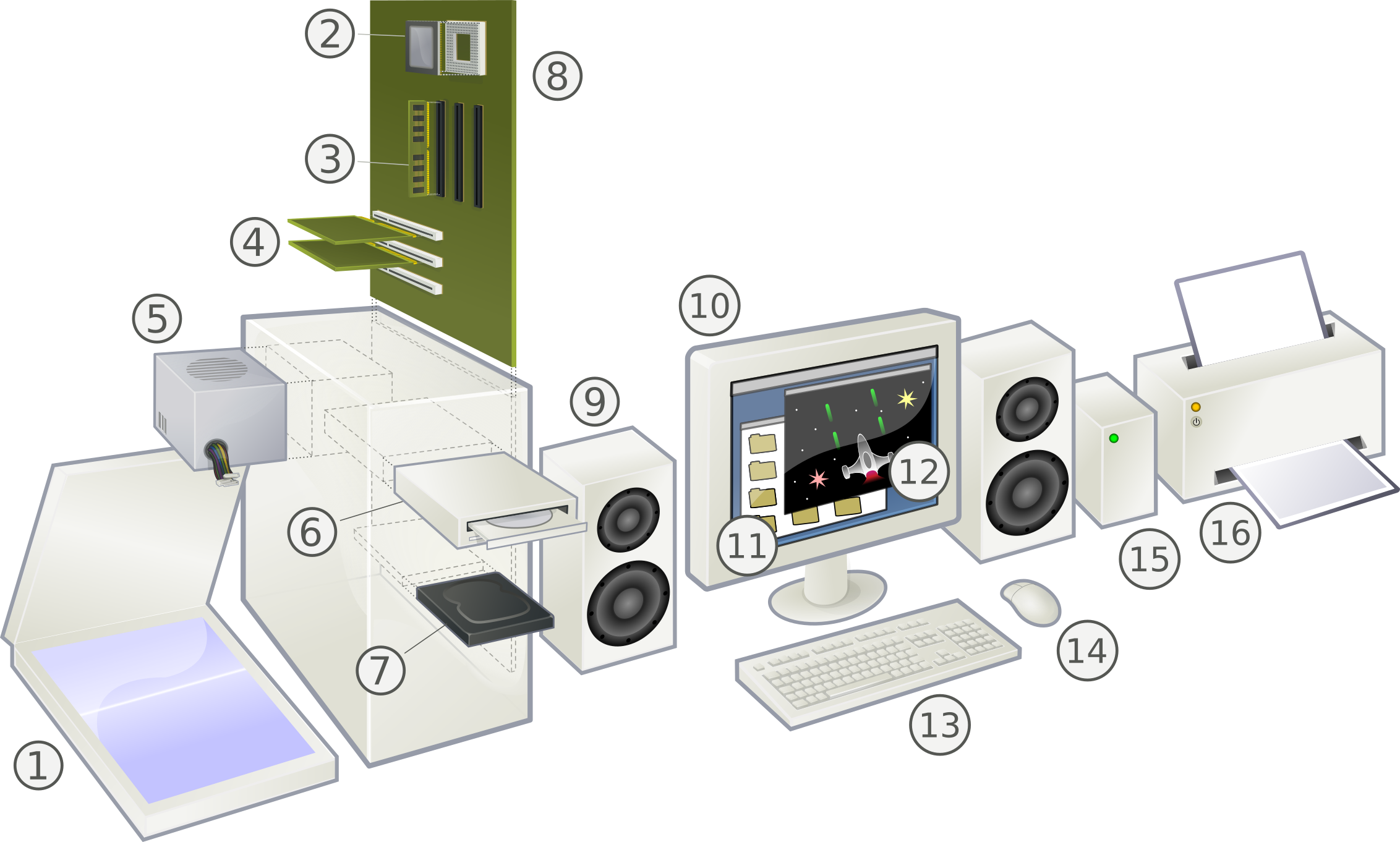
Structure d’un périphérique
Au périphérique est associé un contrôleur (e.g. contrôleur disque) qui possède :
- des registres
- des machines à état
- …
Le périphérique est couplé aux bus d’adresses, données, contrôle.
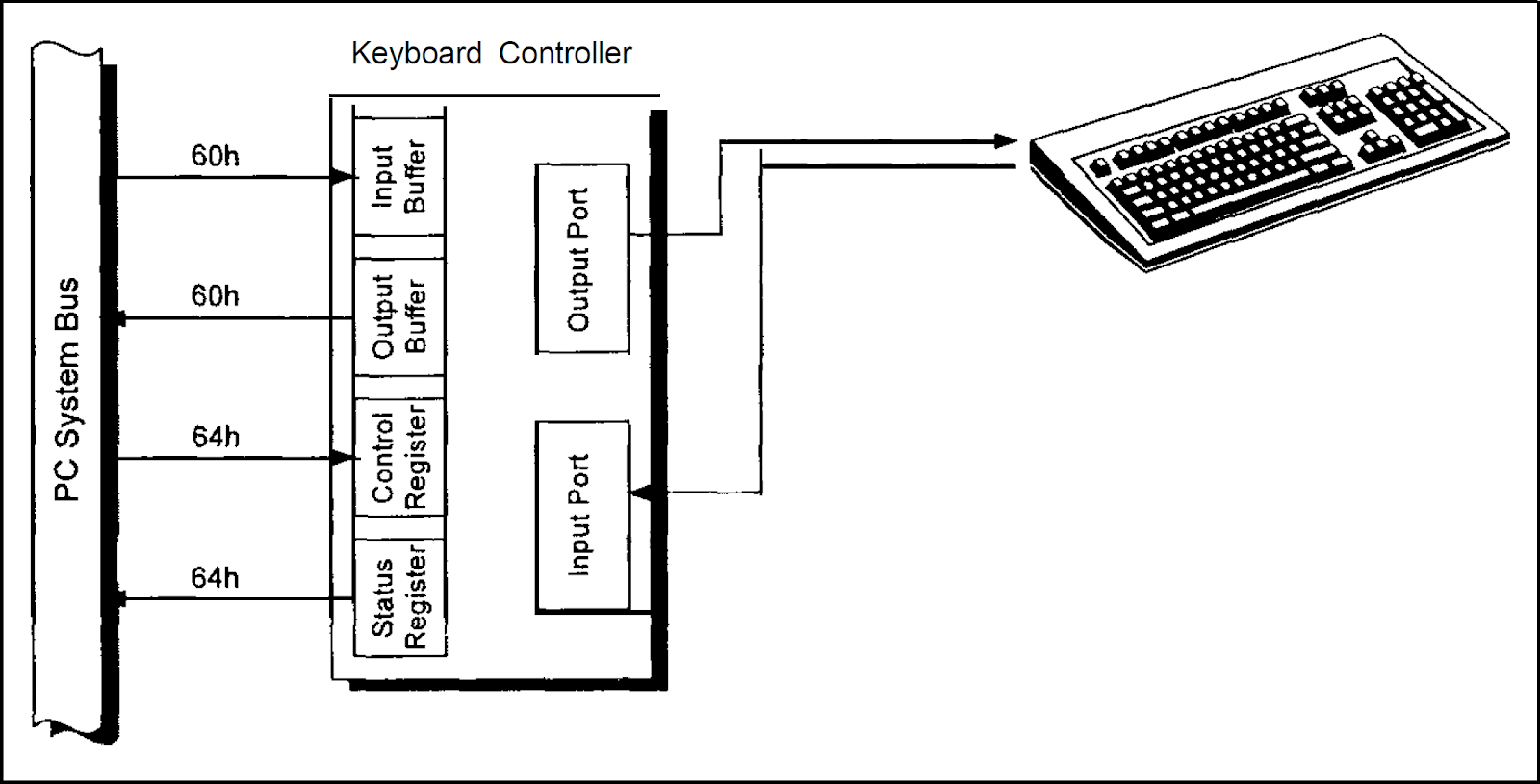
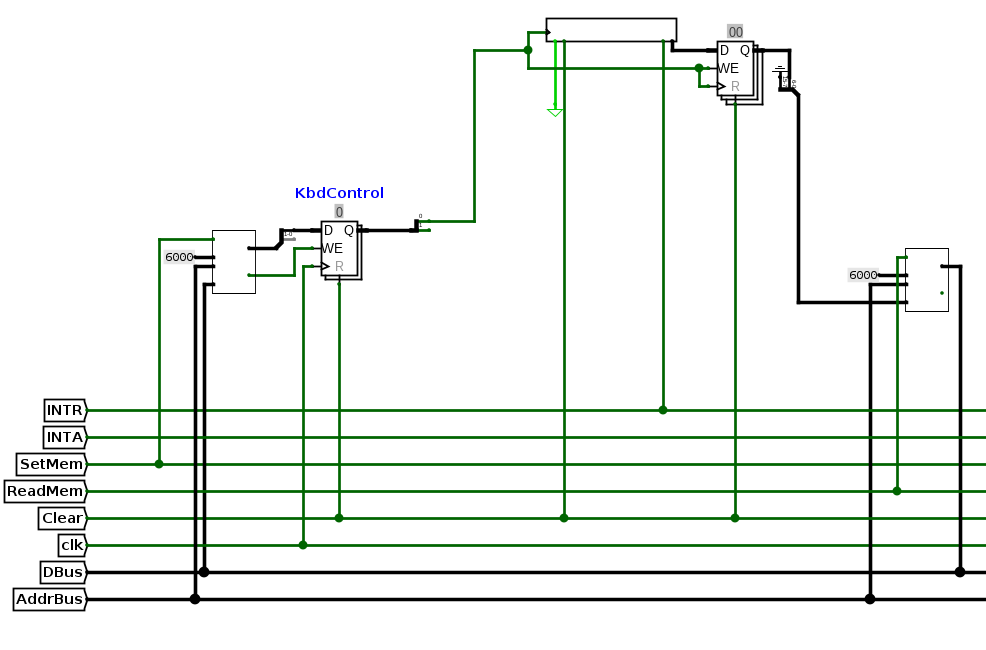
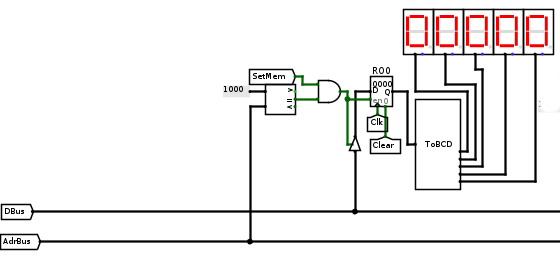
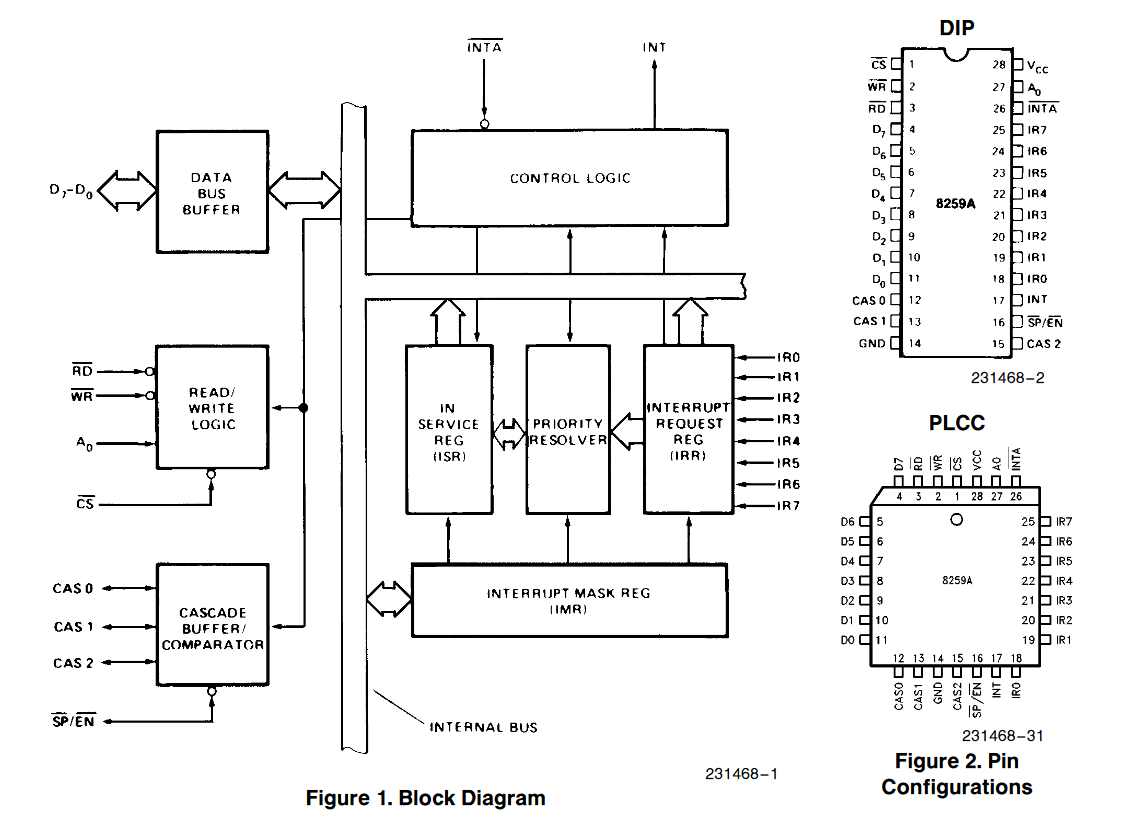
Exemple d’un contrôleur clavier (e.g. Intel 8042)
Contrôleur clavier minimaliste sur notre architecture :
Bus : Interconnexion des périphériques et du chemin de données
Interconnexion des périphériques et du chemin de données
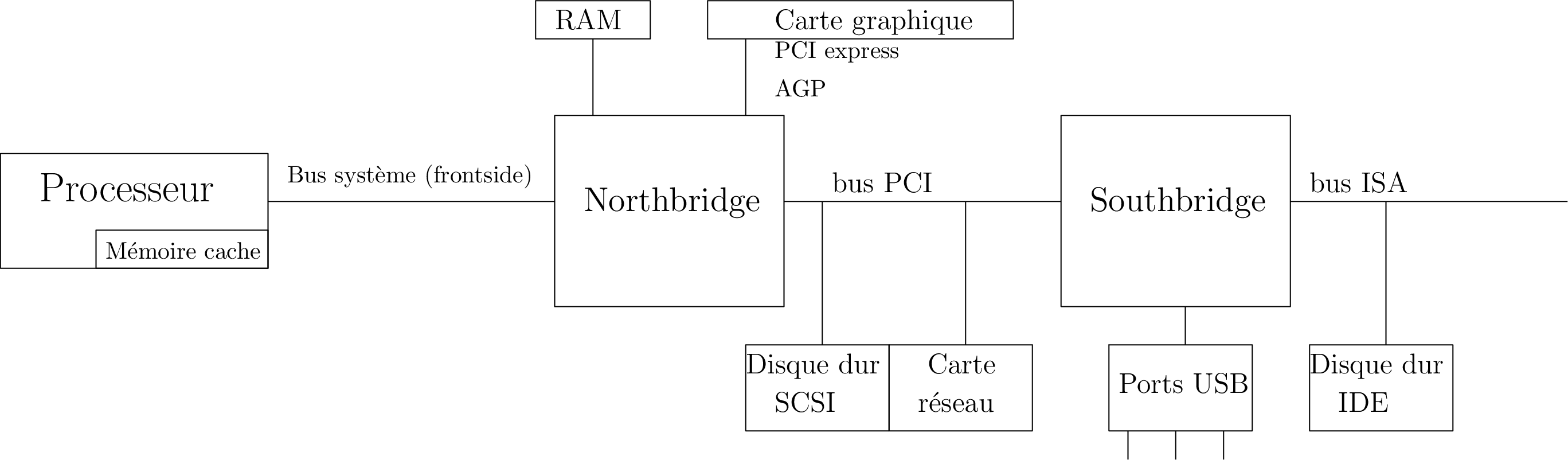
Les bus
| Bus | Largeur (bits) | Clk (MHz) | Débit (Mo/s) | Année |
|---|---|---|---|---|
| ISA 16 | 16 | 8.33 | 15.9 | 1984 |
| PCI 32 | 32 | 33 | 125 | 1993 |
| AGP | 32 | 66 | 250 | 1997 |
| PCI-E 3 (x16) | 16 | 8000 | 16000 | 2011 |
Bus parallèles (échange de mots, large mais court) / Bus série (bit à bit, e.g. USB)
Comment contacter les entrées/sorties ?
Il faut pouvoir contacter les registres du contrôleur du périphérique.
E/S mappées en mémoire
- comme pour un accès mémoire LDA, STA
- avec des adresses réservées, ciblant les périphériques
Autre solution : pas de bus d’adresse; placer dans le message un identifiant du destinataire.
Protocoles d’échange : e.g. lecture mémoire
Echange synchrone

Fréquence d’horloge : ajustée au périphérique le plus lent
Protocoles d’échange : e.g. lecture mémoire
Echange asynchrone : Master/Slave
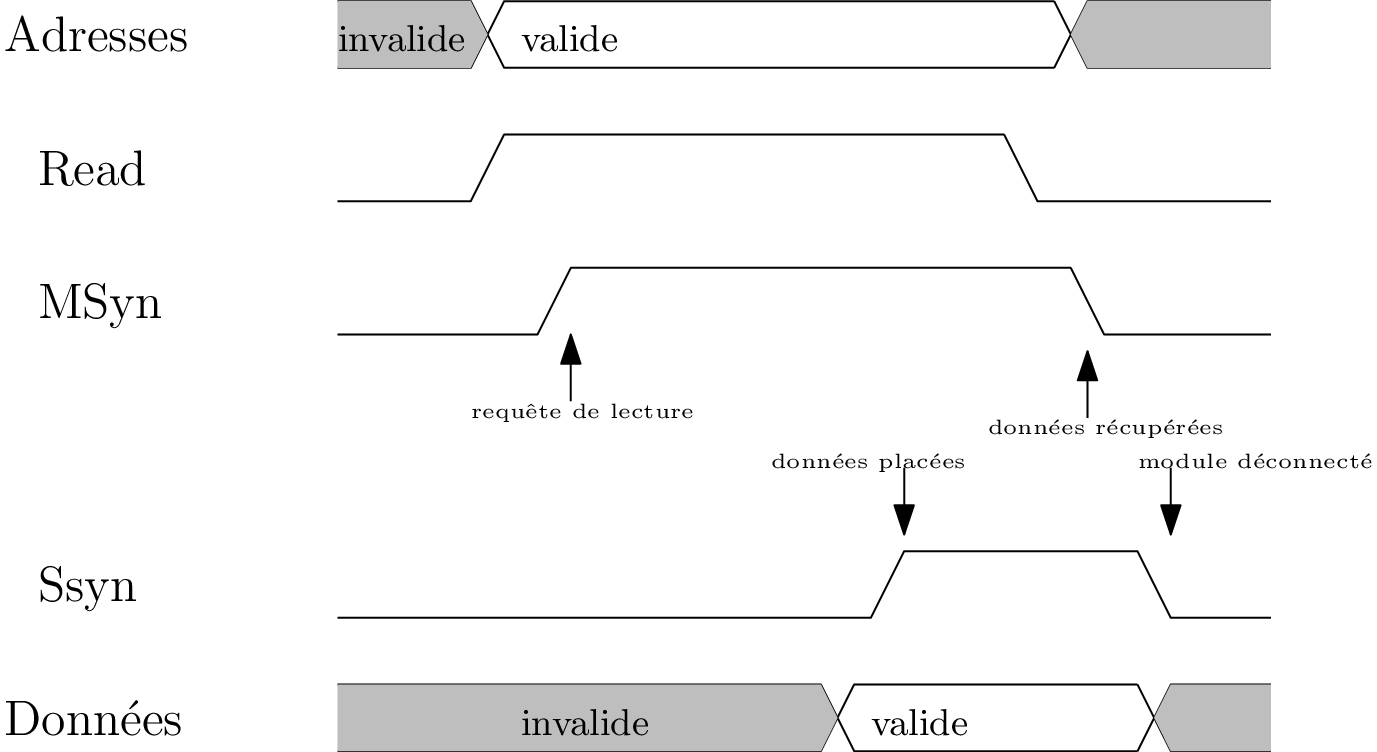
Pas d’horloge mais des signaux d’état : handshaking
Plus réactif mais plus compliqué à mettre en oeuvre.
Protocoles d’échange : e.g. lecture mémoire
Echange demi-synchrone
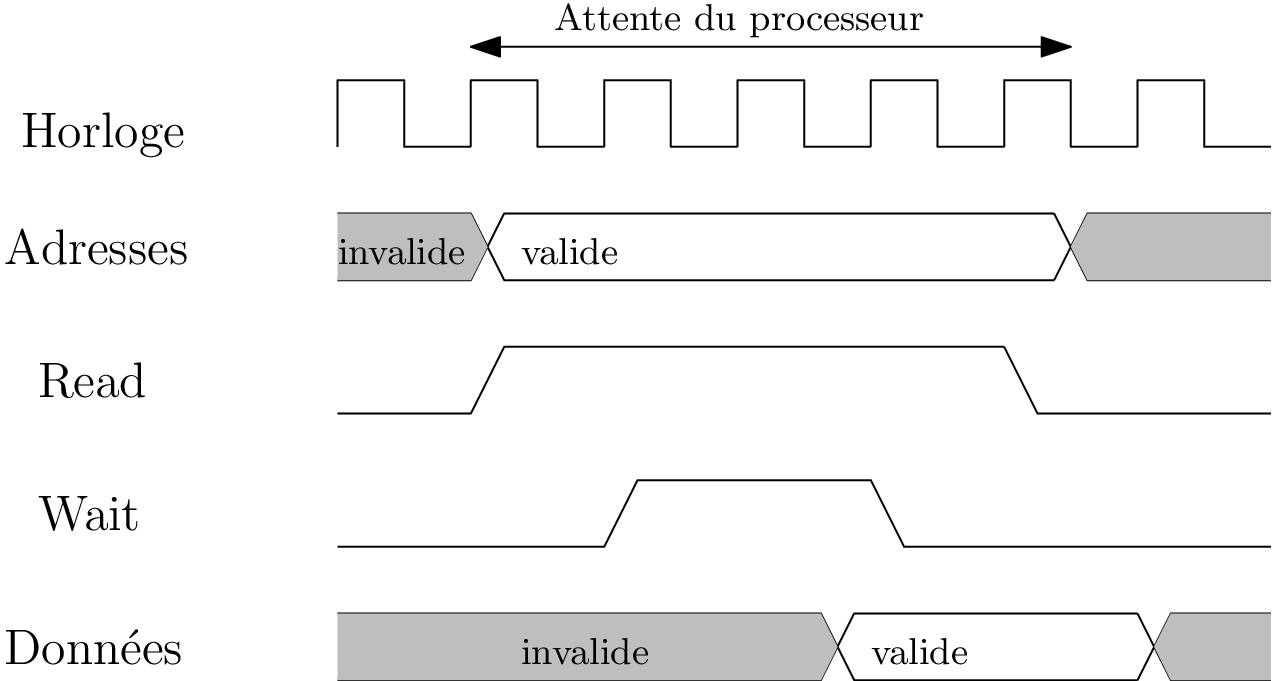
Attente ? e.g. Wait State : attente active
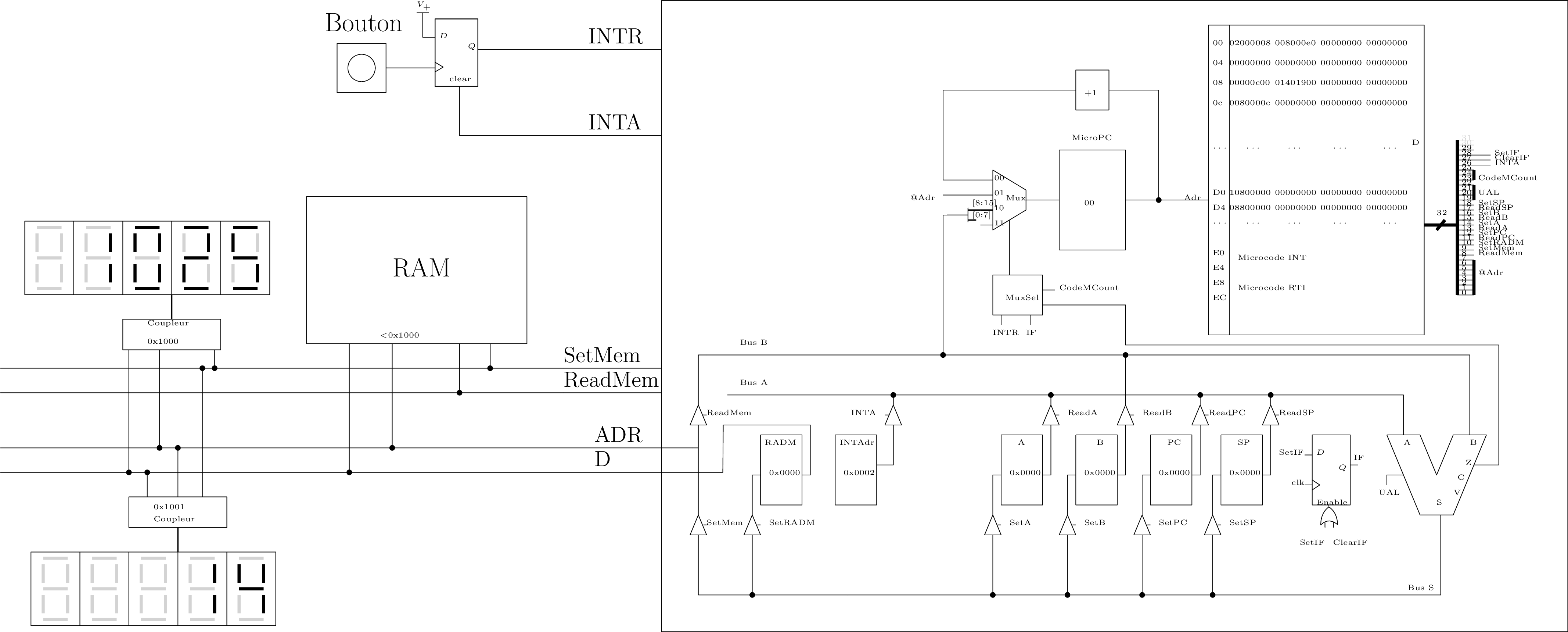
Modification du chemin de données
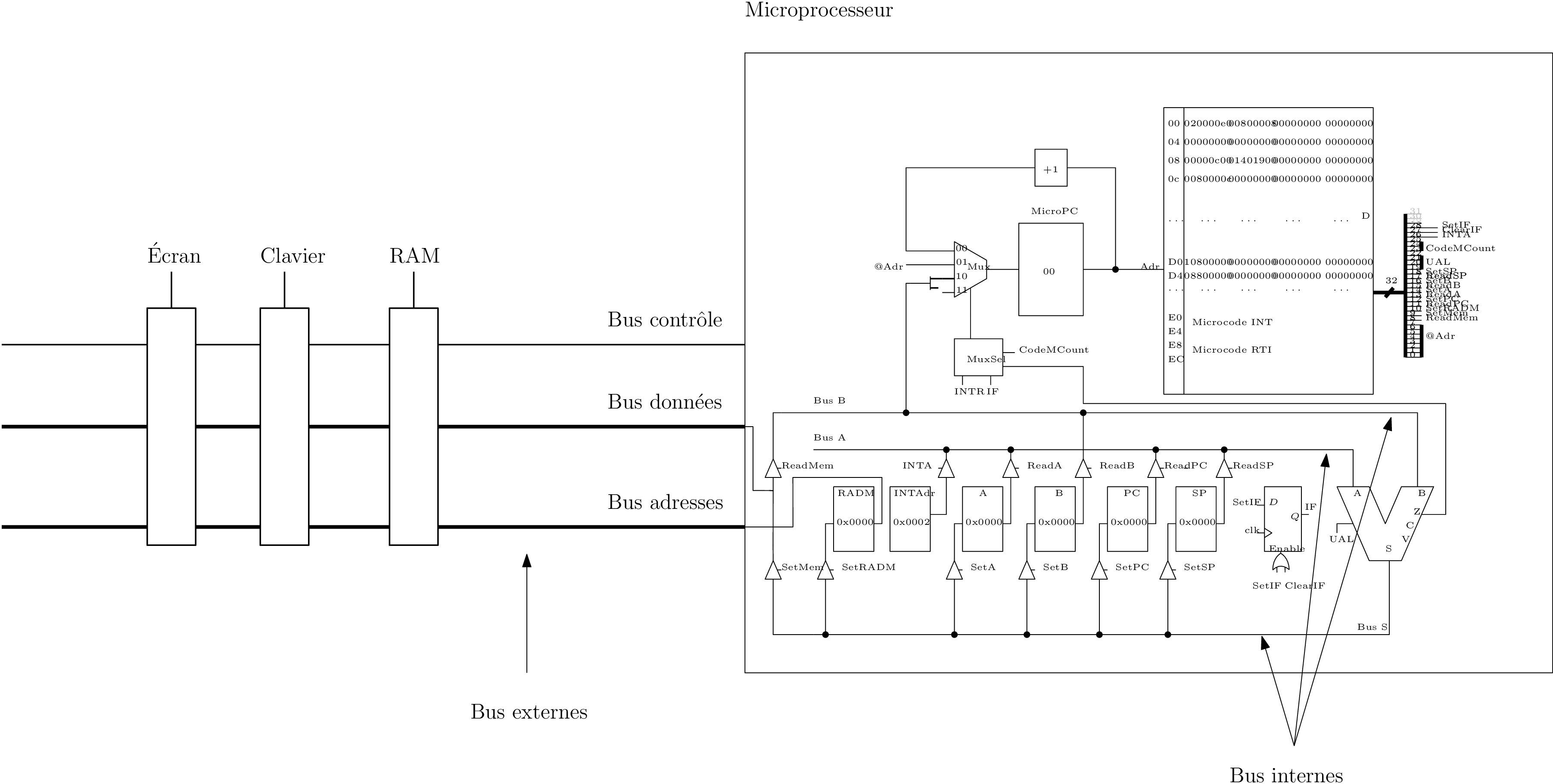
On ajoute une ligne de requête d’interruption (INTR) qu’un périphérique peut mettre à l’état haut. Registre IF pour y être sensible ou non.
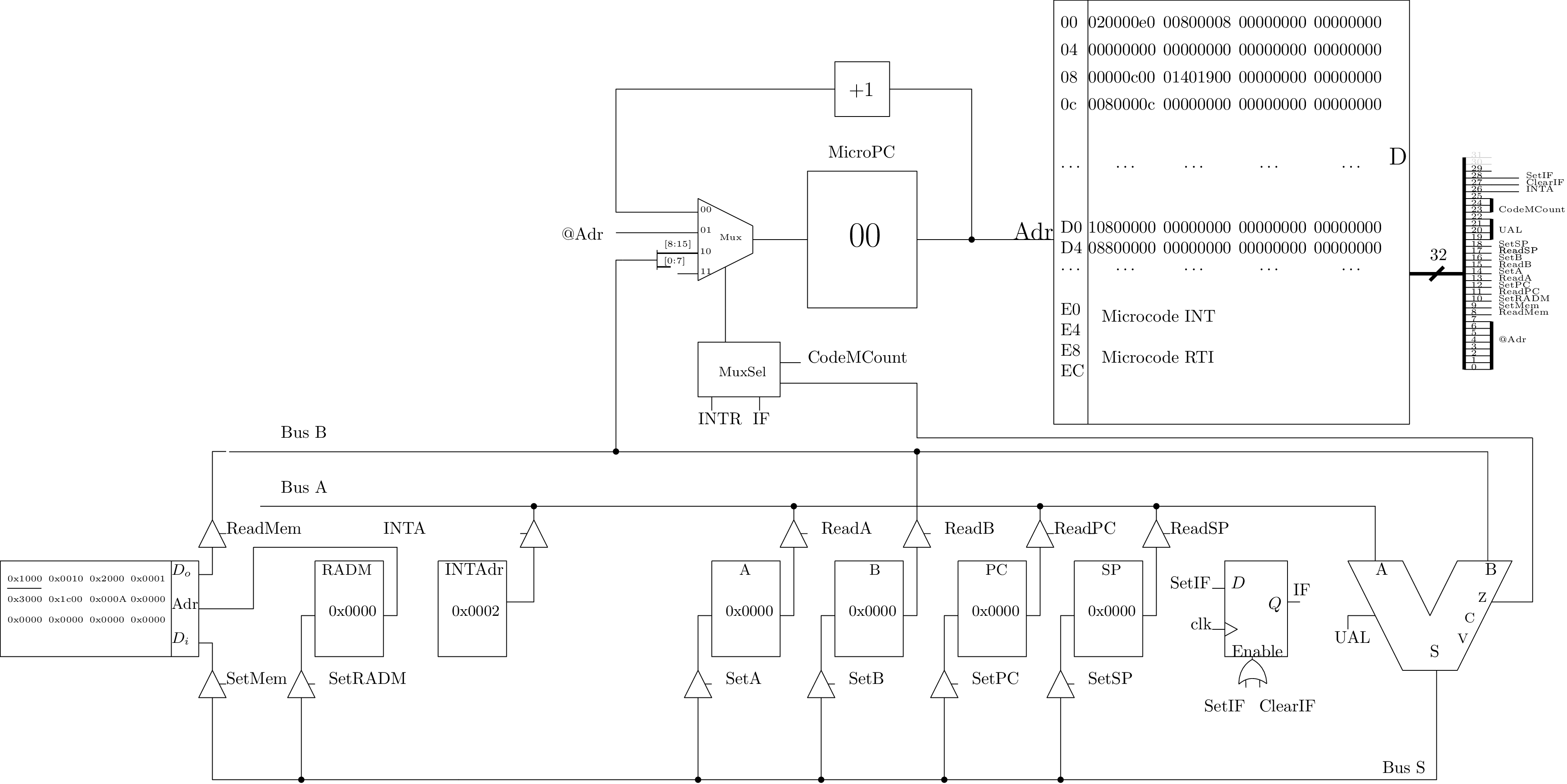
Chez nous : une seule interruption
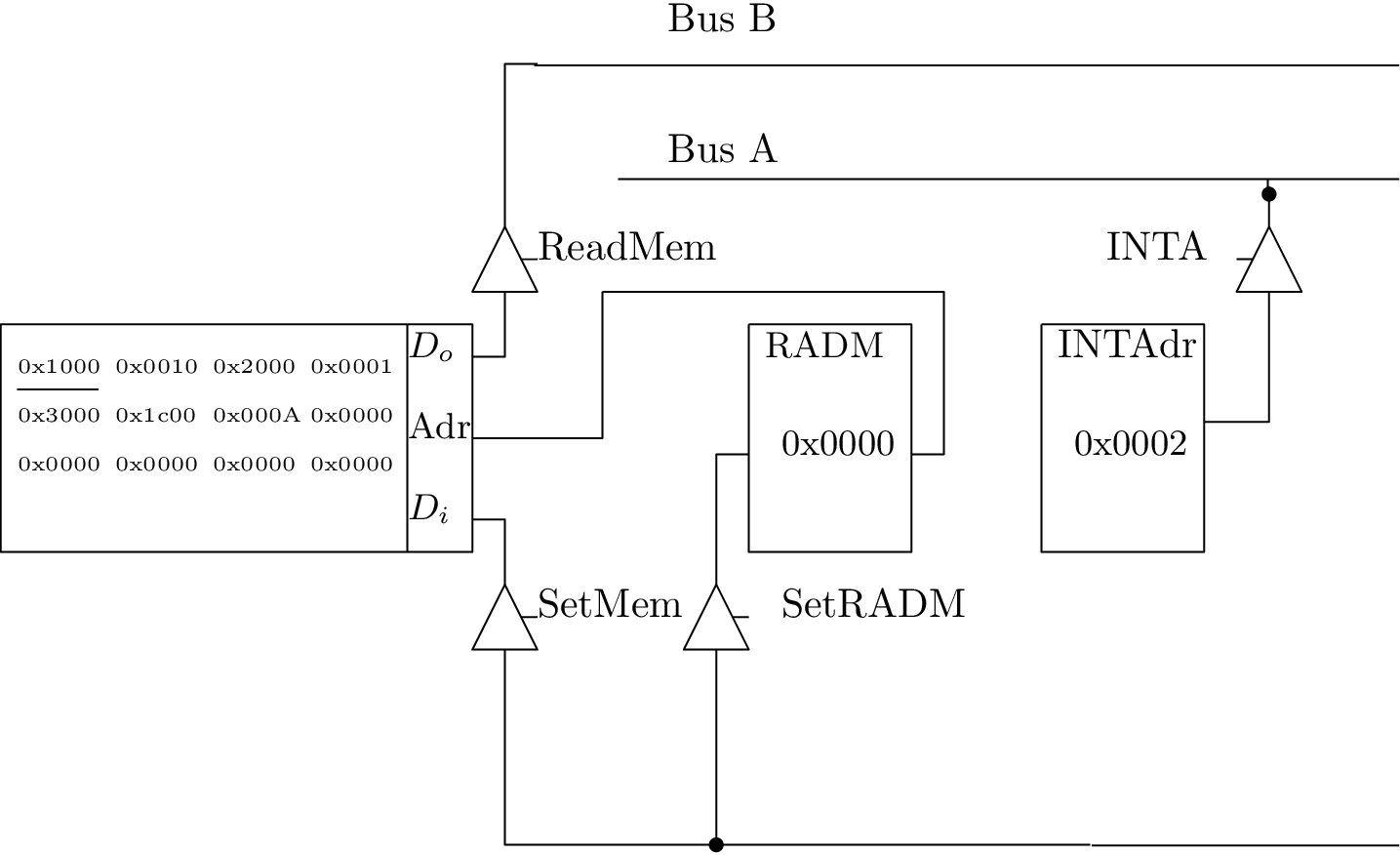
Pour le moment, avec une seule interruption, l’adresse de la routine d’interruption est codée en dur, dans le registre INTAdr
Résumons
- le périphérique lève une requête d’interruption INTR=1
- le processeur détecte la requête
- le processeur sauvegarde l’état courant et se branche sur la routine d’interruption (vecteur d’interruption ou interrupt handler)
- le processeur accuse réception
- le processeur restaure l’état
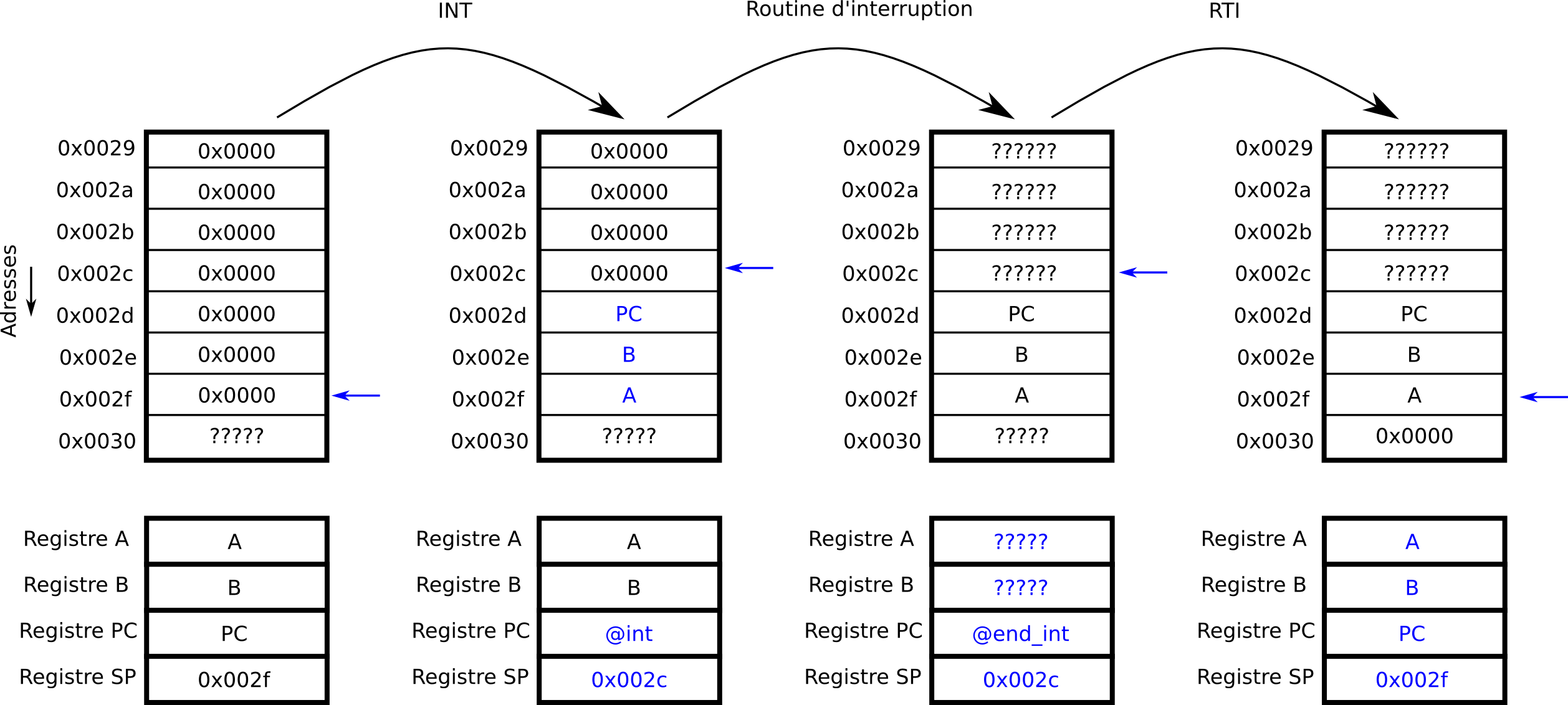
Attention
La gestion de l’interruption implique la pile !!
⇒ Phase d’initialisation (JMP init) minimale : 1. par défaut IF = 0 2. LDSPI … 3. STI
Exemple jouet : En TP
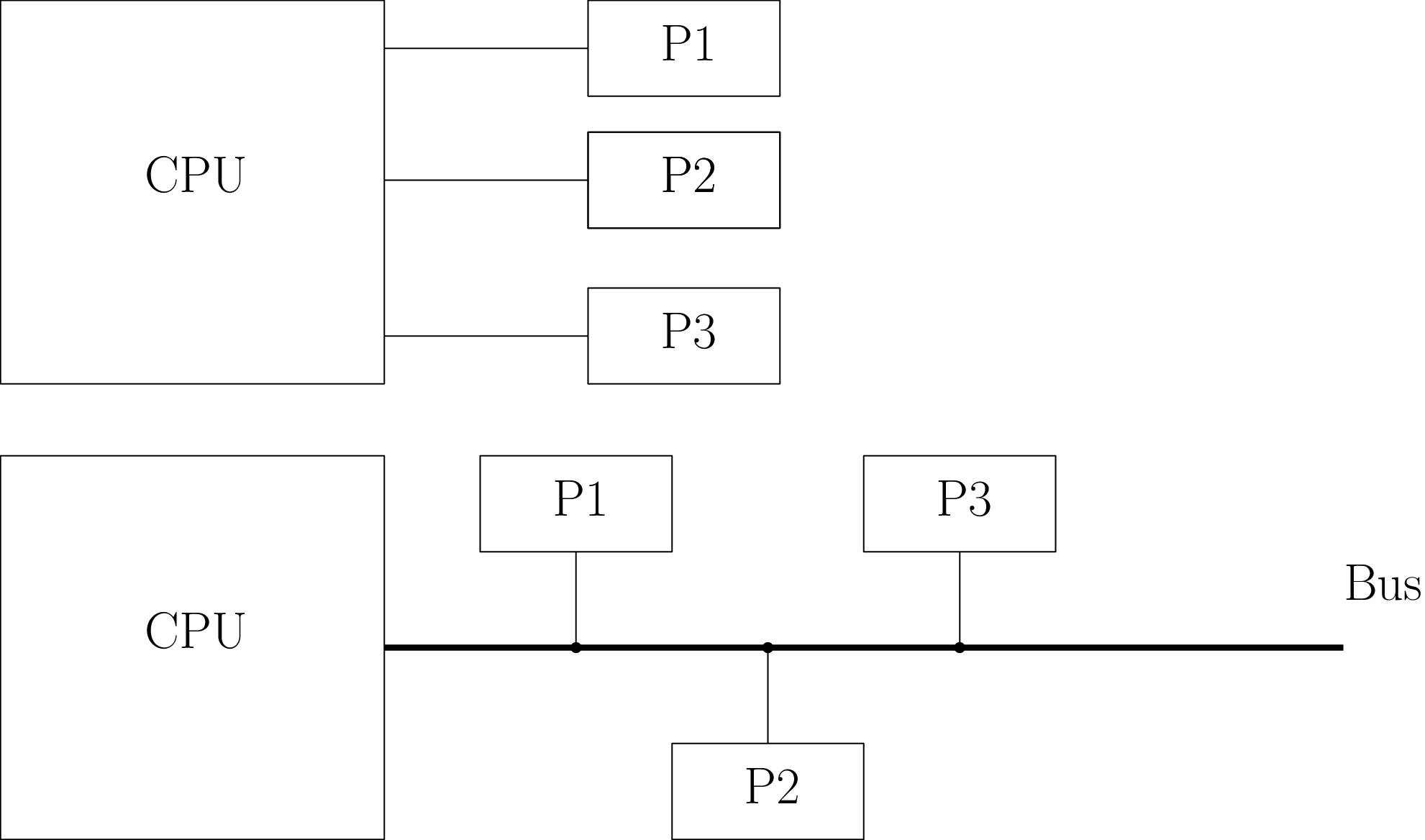
Plusieurs interruptions ?
On s’est limité pour le moment à un seul périphérique.
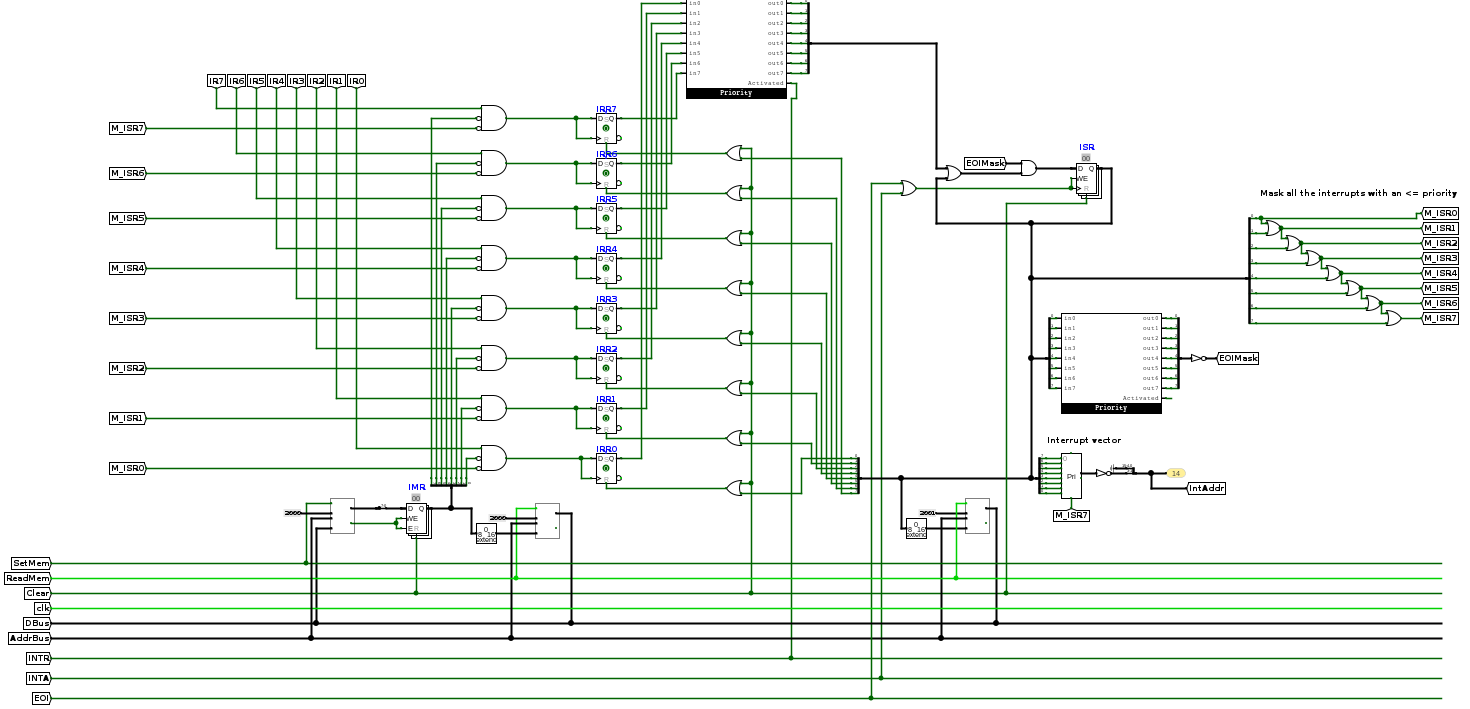
Prise en charge de plusieurs interruptions
- Plusieurs lignes d’interruptions
- Centralisation et arbitrage des demandes d’interruptions; Le vecteur d’interruption est récupéré sur le bus de données
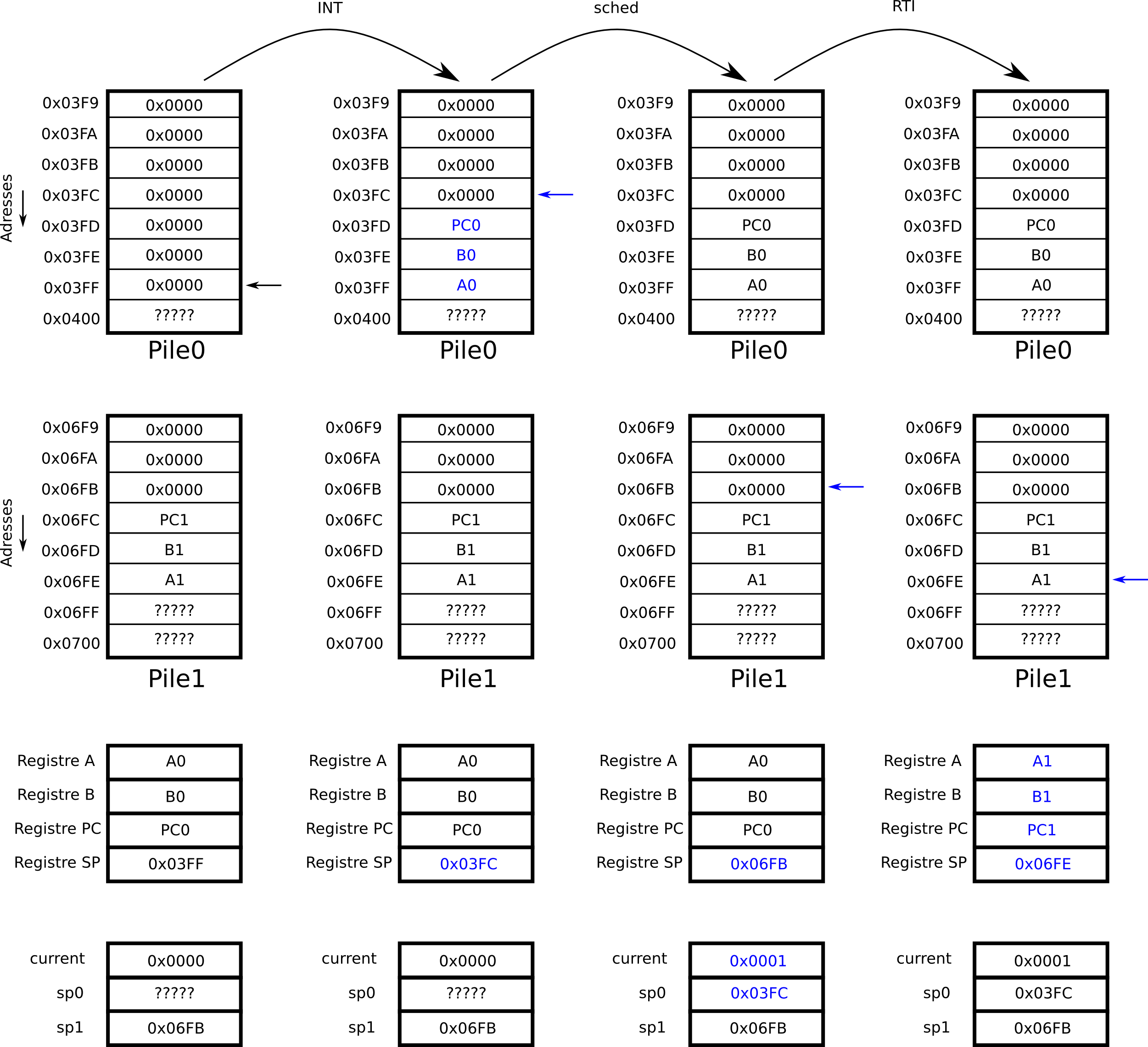
Petits pas vers l’OS : Ordonnanceur
Problème
Comment exécuter plusieurs programmes “en même temps” :
- avec plusieurs chemins de données (architectures multi-coeurs)
- avec un seul chemin de données partagé par deux programmes : en TP et un basculement de contexte régulier (interruption d’un timer)
Initialisation
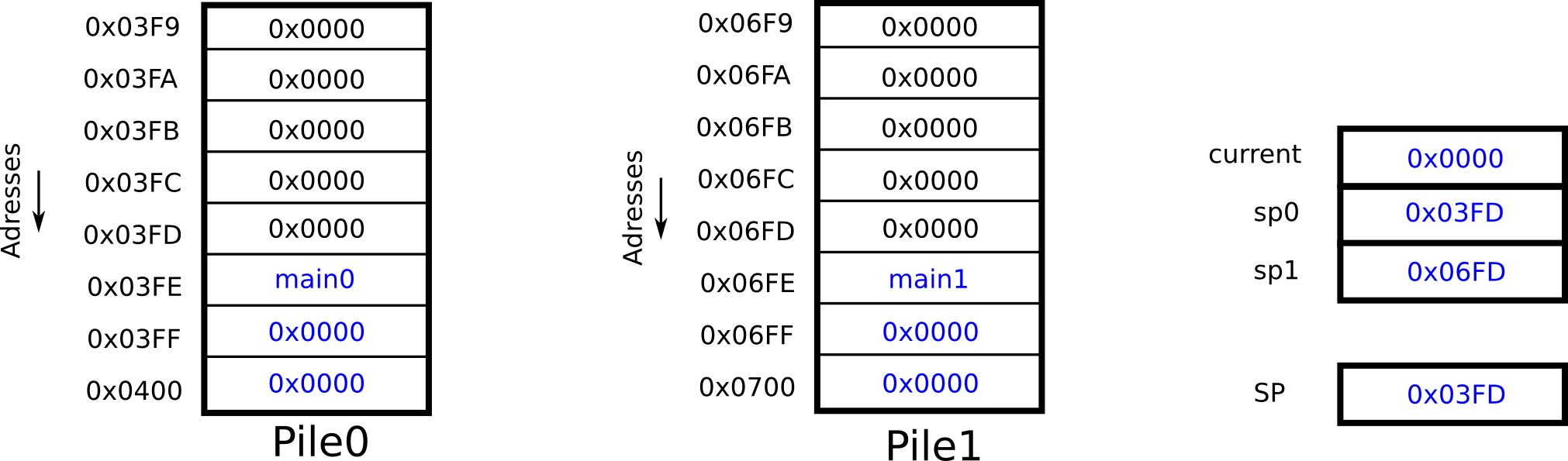
Basculement de contexte
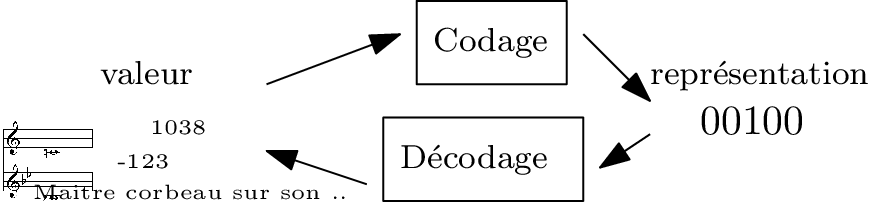
Cours 1 : Codons tout en binaire
Codage/décodage
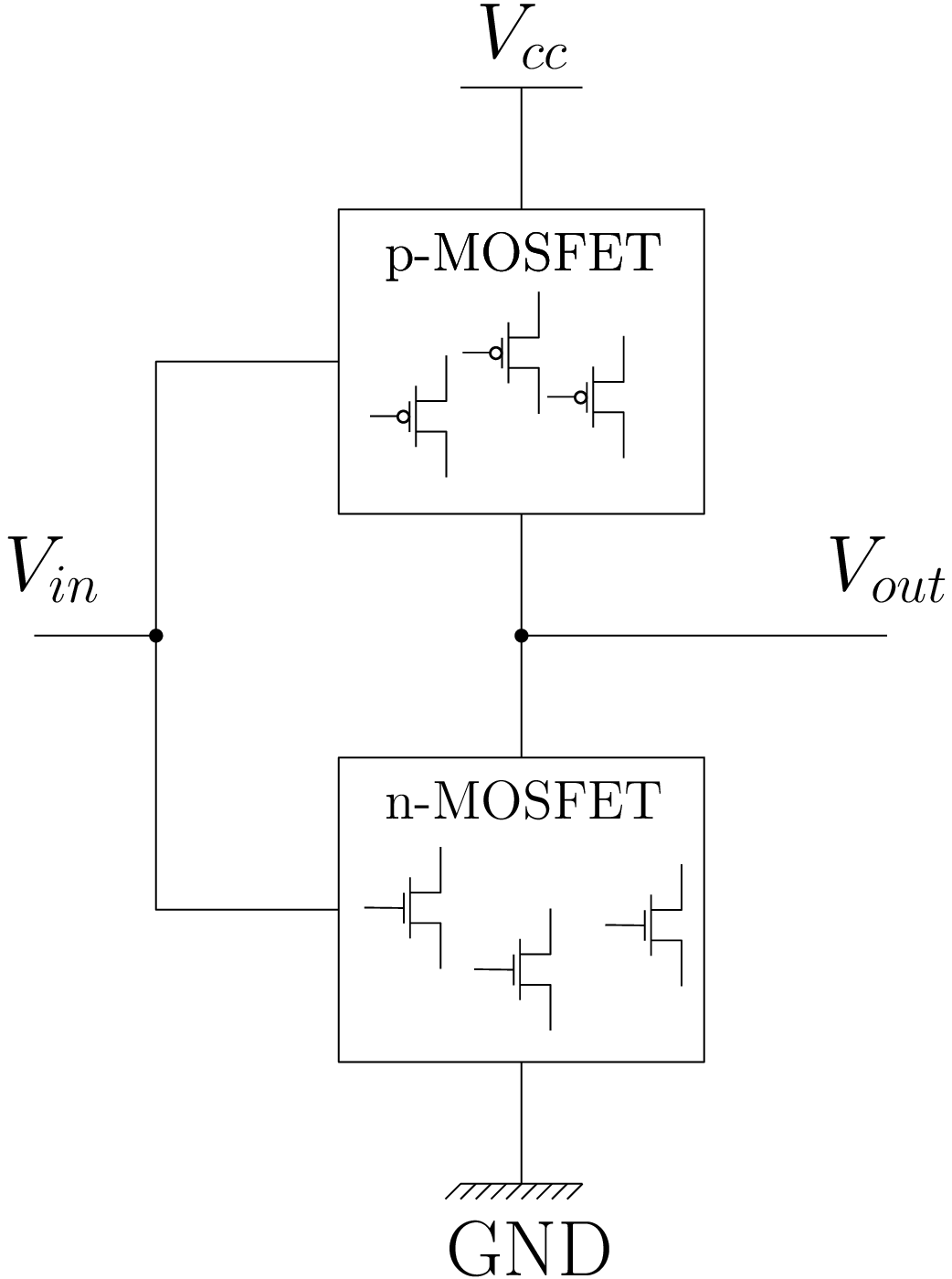
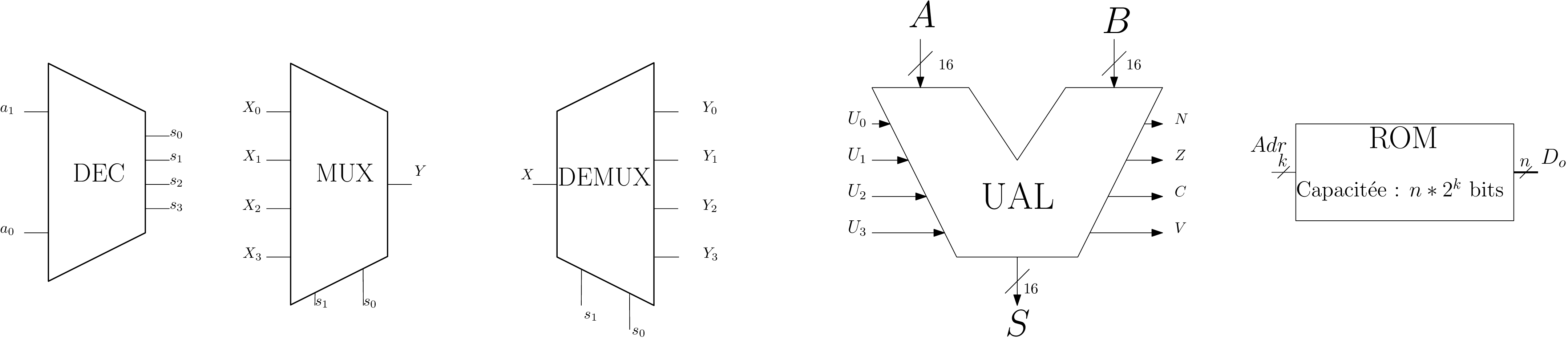
Cours 2-3 : Transistors, Circuits logiques, séquenceur
Couche physique
Couche logique
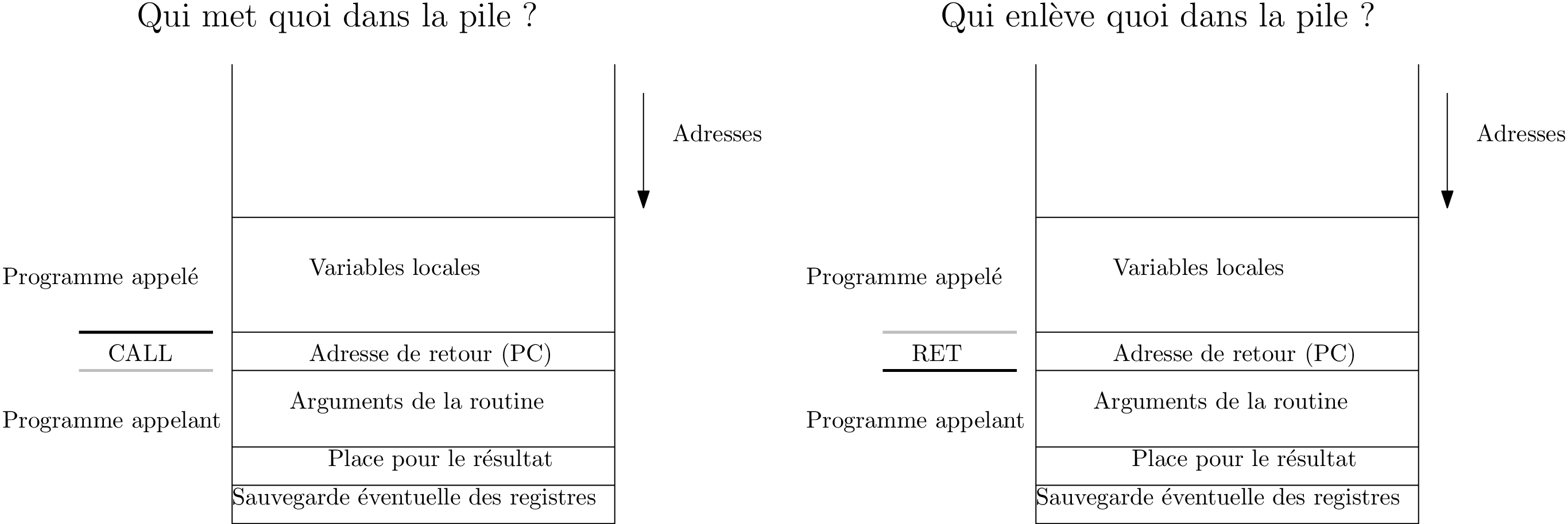
Cours 4-5 : pile et programmation
Pile et procédures
Programmation
⇒ Ouverture vers la programmation (C++, etc..)
Cours 6 : mémoires caches
Hierarchie de mémoire
Cours 7 : périphériques et interruptions
Comment exploiter les principes de localité ?
Solution 1) A la charge du programmeur
→ Pas très pratique…
Solution 2) Hierarchie de mémoires
Performances du cache
Temps moyen d’accès mémoire \(T_m \approx HR. t_{cache} + MR. t_{mem}\)
Pour \(HR = 90\%\) : \(T_m = 17 ns\).